账号
密码
下次自动登录 进入商务室
立即注册忘记密码?
直线电机利用电能直接产生直线运动,其原理与相应的旋转式电动机相似,在结构上可以看作是由相应旋转电机沿径向切开,拉直演变而成。 随着自动化技术的发展,精密、高速机床进给系统的需要,有效体现了直线电机的显着性能,直线电机的研究成为了研究领域的热点。
我们再来看无刷电机,从字面意思我们可以知道,无刷电机是没有碳刷的。其工作原理为利用励磁机与调压装置相连,起到调压作用。
电机长期的处于高压力区运转,这样就会导致电机轴功率增大,进而使得电机的电流超过额定值,且出现过载的现象,还会出现电机三组绕组全部被烧毁的现象,因此,当电机一旦长期处于高压力区运行时,应恰当地卸压,或者更换功率适宜的电动机。
我们在前面一直分享着有关减速机的相关知识与一些技巧,这其中我们对于大部分减速机来说我们会反复的提到以下几个特征——体型和声音等方面,以及减速机的优势成本与使用便利等方面!
甩包是绕线转子不时会遇到的问题,甩包的表象,是转子绕组端部发生径向的严重变形,导致绕组端部因变形,而出现与定子绕组相擦问题,最终结果是定子、转子绕组均损毁,电机出现致命性故障。
微型直流电机生产出来一般都是上千转左右,如果需要把转速做到几十转的话,就要通过装上齿轮减速箱来实现了,如1:50、1:80的减速比,就能降低电机的转速,这种低转速的微电机力矩较大,一般适用于智能锁、3D笔、标签打印机等产品。
无刷电机的优点包括寿命长、很少或不需要维护以及效率高,缺点是初始成本高,电机速度控制器复杂,其他类型的直流电机不需要换相,包括单极电机和滚珠轴承电机。使用电池电源的便携性、高启动扭矩、双向操作、设计用于变速、速度控制出色以及无与伦比的可靠性。
某矿业集团煤矿吸水泵高压电机因为运行不如意导致轴承提温损坏:电机额定功率1250KW、转速比1493r/min、轴径17b250m,支撑点侧活塞销构造运作溫度60-80℃;轴承径向精准定位为卡簧。轴承位损坏宽45mm,磨损率1-3mm。
轴承或轴承装配质量不好,此时轴承将严重发热或转动不灵活。外风扇用错(如2极电机使用了4极的风扇)或扇叶角度有误;按照常规设计,2P电机风扇相对较小,通过调整风扇方法降低损耗的方法非常有效,但前提是要保证电机的温升性能。
步进电机作为执行元件,是机电一体化的关键产品之一, 广泛应用在各种自动化控制系统中。随着微电子和计算机技术的发展,步进电机的需求量与日俱增,在各个国民经济领域都有应用。
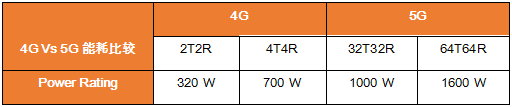
电能功率(Power)是电压(Voltage)与电流(Current)的乘积(P=Vi),若将电压及电流值绘于图面上,则两者交叠的面积就是电能功率,面积越大则能量越大。电机由电能输入转换为动能输出的装置,在无不良的饱和设计情況下,则输入电能越多则输出的动能也就越大。
鉴于生产周期、人工成本和电机可靠性等多种因素,自动、半自动的包带设备,被不少电机生产厂家所接纳,尽管设备的价位相对昂贵,但智能化操作,是改善高压电机质量、提升电机生产工效的有效途径。
它表示控制系统每发一个步进脉冲信号,电机所转动的角度。电机出厂时给出了一个步距角的值,如86BYG 250A型电机给出的值为0.9°/1.8°(表示半步工作时为0.9°、整步工作时为1.8°),这个步距角可以称之为‘电机固有步距角’,它不一定是电机实际工作时的真正步距角,真正的步距角和驱动器有关。
噪音方面与是否是有刷电机无关,主要是看轴承和电机内部组件的配合情况。无刷电机用电子换向器代替了有刷电机的机械换向器,因而控制方法也就大不相同,复杂程度明显提高。无刷电机A、B、C三相绕组的轮流通电,完成换相要求,电机正常运转。
换相误差的存在会造成BLDCM带载能力减弱、调速范围减小并使电流纹波加剧等影响。这些影响在电机高速运行时更甚,因此有必要对高速永磁BDLCM的换相校正技术进行深入研究。
微型减速电机基本上各个行业都会用到,这种微型电机已经在我们生活当中应用非常多,如机器人产品,机器人可以模仿人类的动作,包括走、跑、跳、握手等动作,因此微型减速电机主要用在机器人的各关节上,通过微型减速电机驱动模仿人类各种动作。
微型直流电机有无刷电机和有刷直流电机,有刷直流电机改变供电的电压即可调速;而无刷电机的供电电源的电压必须恒定,与有刷直流电机不同,它能用改变电源电压的方式来调速,而是需要通过调整驱动器才可以实现调速目的。
在20世纪,大中型有刷电机在工业和先进制造领域中发挥着巨大的作用,直流电机的基本理论也被查尔斯•斯坦梅茨(Charles Steinmetz)等杰出人物广泛分析,这包括详细的电路,电动势、磁场方程、性能参数(速度,扭矩,控制和效率)、设计、制造等。
2、MOS管的选型是否合理?①电机驱动瞬间电流比稳定运行时电流(额定电流)要大5~8倍左右,因此MOS管的最大漏极电流应选择电机额定电流10倍以上,比如额定功率为0.5A的电机,MOS管最大漏极电流应选择5A以上,尽量选择内阻小的MOS管,其内阻越小越好。
所有微型电机都有一定的步进误差,工程师们自然会尽可能选择误差最小的电机。例如,步进误差以弧分为增量进行测量,其中1弧分等于0.0167°,在64微步进时,0.9°步进电机的行业平均误差为0.075°(4.5弧分),0.9°步进电机平均误差仅为0.025度(1.5弧分),步进电机可以在确定在任何位置停止和保持位置。
速度控制一般都是有变频器实现,用伺服电机做速度控制,一般是用于快速加减速或是速度精准控制的场合,因为相对于变频器,伺服电机可以在几毫米内达到几千转,由于伺服都是闭环的,速度非常稳定。转矩控制主要是 控制伺服电机的输出转矩,同样是因为伺服电机的响应快。
矩形波驱动又叫方波驱动,流过电机的电流是类似梯形的波形,是一种最简单的驱动方法,控制相对简单,成本低。其根据转子的旋转角度切换功率电子元件的ON/OFF状态,从而改变定子线圈的电流方向来驱动转子旋转。
无刷直流电动机定子由叠层钢制成,叠层钢用来承载绕组,绕组定子可以按两种模式排列-星型模式(Y)或三角形模式(Δ)。在这两种模式之间主要区别,Y模式在低转速下提供高扭矩,而Δ模式提供低转速时扭矩低。
众所周知,电机是传动以及控制系统中的重要组成部分,随着现代科学技术的发展,电机在实际应用中的重点已经开始从过去简单的传动向复杂的控制转移;尤其是对电机的速度、位置、转矩的精确控制。
首先“永磁同步电机”是交流电机,因为无论作为发电机还是电动机使用,它的定子绕组中电流都是交流的,而它的转子上有永磁体,绕组上为感应电流。
 订阅号
订阅号
 服务号
服务号
 视频号
视频号
 抖音号
抖音号